Inscreva-se em nossas redes sociais para receber atualizações em primeira mão.
Os giroscópios a laser de anel (RLGs) evoluíram significativamente desde a sua concepção, desempenhando um papel fundamental nos modernos sistemas de navegação e transporte. Este artigo explora o desenvolvimento, o princípio de funcionamento e as aplicações dos RLGs, destacando a sua importância nos sistemas de navegação inercial e a sua utilização em diversos mecanismos de transporte.
A Jornada Histórica dos Giroscópios
Do conceito à navegação moderna
A jornada dos giroscópios começou com a coinvenção da primeira girobússola em 1908 por Elmer Sperry, apelidado de "o pai da tecnologia de navegação moderna", e Herman Anschütz-Kaempfe. Ao longo dos anos, os giroscópios passaram por melhorias substanciais, ampliando sua utilidade na navegação e no transporte. Esses avanços permitiram que os giroscópios fornecessem orientações cruciais para a estabilização de voos de aeronaves e viabilizassem operações de piloto automático. Uma demonstração notável feita por Lawrence Sperry em junho de 1914 evidenciou o potencial do piloto automático giroscópico ao estabilizar um avião enquanto ele permanecia na cabine de comando, marcando um salto significativo na tecnologia de piloto automático.
Transição para giroscópios a laser de anel
A evolução continuou com a invenção do primeiro giroscópio a laser de anel em 1963 por Macek e Davis. Essa inovação marcou uma mudança dos giroscópios mecânicos para os giroscópios a laser, que ofereciam maior precisão, menor necessidade de manutenção e custos reduzidos. Hoje, os giroscópios a laser de anel, especialmente em aplicações militares, dominam o mercado devido à sua confiabilidade e eficiência em ambientes onde os sinais de GPS são comprometidos.
O princípio dos giroscópios a laser de anel
Entendendo o Efeito Sagnac
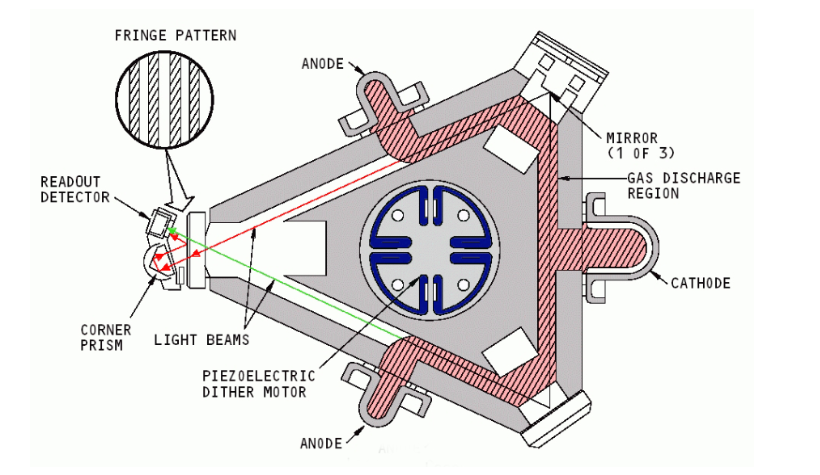
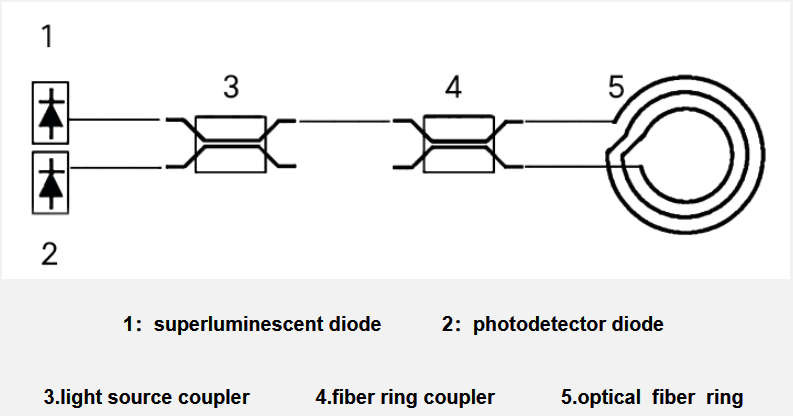
A principal funcionalidade dos RLGs reside na sua capacidade de determinar a orientação de um objeto no espaço inercial. Isso é conseguido através do efeito Sagnac, onde um interferômetro de anel utiliza feixes de laser que se propagam em direções opostas ao longo de um percurso fechado. O padrão de interferência criado por esses feixes atua como um ponto de referência estacionário. Qualquer movimento altera o comprimento do percurso desses feixes, causando uma mudança no padrão de interferência proporcional à velocidade angular. Este método engenhoso permite que os RLGs meçam a orientação com excepcional precisão sem depender de referências externas.
Aplicações em Navegação e Transporte
Revolucionando os Sistemas de Navegação Inercial (INS)
Os RLGs são fundamentais no desenvolvimento de Sistemas de Navegação Inercial (INS), que são cruciais para guiar navios, aeronaves e mísseis em ambientes sem GPS. Seu design compacto e sem atrito os torna ideais para tais aplicações, contribuindo para soluções de navegação mais confiáveis e precisas.
Plataforma estabilizada vs. Inserção por cintas
As tecnologias INS evoluíram para incluir sistemas de plataforma estabilizada e sistemas strapdown. Os sistemas INS de plataforma estabilizada, apesar de sua complexidade mecânica e suscetibilidade ao desgaste, oferecem desempenho robusto por meio da integração de dados analógicos.Por outro lado, os sistemas INS strapdown beneficiam-se da natureza compacta e isenta de manutenção dos RLGs, tornando-os uma escolha preferencial para aeronaves modernas devido à sua relação custo-benefício e precisão.
Aprimorando a navegação de mísseis
Os RLGs também desempenham um papel crucial nos sistemas de orientação de munições inteligentes. Em ambientes onde o GPS é pouco confiável, os RLGs oferecem uma alternativa segura para navegação. Seu tamanho reduzido e resistência a forças extremas os tornam adequados para mísseis e projéteis de artilharia, como exemplificado por sistemas como o míssil de cruzeiro Tomahawk e o M982 Excalibur.

Diagrama de exemplo de plataforma inercial estabilizada com gimbal utilizando suportes. Cortesia da Engineering 360.
Isenção de responsabilidade:
- Declaramos que algumas das imagens exibidas em nosso site foram coletadas da internet e da Wikipédia, com o objetivo de promover a educação e o compartilhamento de informações. Respeitamos os direitos de propriedade intelectual de todos os criadores. O uso dessas imagens não tem fins comerciais.
- Se você acredita que algum conteúdo utilizado viola seus direitos autorais, entre em contato conosco. Teremos o maior prazer em tomar as medidas cabíveis, incluindo a remoção de imagens ou o fornecimento de créditos adequados, para garantir a conformidade com as leis e regulamentações de propriedade intelectual. Nosso objetivo é manter uma plataforma rica em conteúdo, justa e que respeite os direitos de propriedade intelectual de terceiros.
- Por favor, entre em contato conosco através do seguinte endereço de e-mail:sales@lumispot.cnComprometemo-nos a tomar medidas imediatas ao receber qualquer notificação e garantimos 100% de cooperação na resolução de quaisquer problemas dessa natureza.
Data da publicação: 01/04/2024